Perguntas frequentes sobre o robolink® W - Conjunto de articulações para robôs
Perguntas frequentes
1) Que tipos de articulações da igus® estão disponíveis em stock?
Atualmente, existem 6 articulações diferentes standard
1 – RL-50-PL1: articulação oscilante2 – RL-50-TL1: articulação rotativa
3 – RL-50-001: articulação de 2 eixos com amplitude de +/-90° ("O clássica")
4 – RL-50-002: articulação de 2 eixos com amplitude de +130°/-50° ("assimétrica")
5 – RL-50-003: articulação de 2 eixos com amplitude +180°/0° ("com dobra")
6 – RL-90-BL1: articulação básica com 2 eixos, ("maior e mais resistente")
Podem ainda ser disponibilizadas versões especiais caso seja necessário.
2) Que ângulos são possíveis configurar? Quais os próprios pesos? E os binários?
Esta lista tem informações sobre os dados básicos. Esta tabela também está no catálogo.| Número de encomenda | Número de cabos |
Ângulo de oscilação |
Ângulo de rotação |
Peso | Carga máx. | ||||
|---|---|---|---|---|---|---|---|---|---|
| do acionamento |
Passagens pos síveis |
Standard (com batente) |
Opcional (*sem batente) |
Standard (com batente) |
Opcional (*sem batente) |
[g] | Oscilante [Nm] |
Rotação [Nm] |
|
| 1. Articulação oscilante RL-50-PL1 |
2 | 4 | 180° (±90°) | 210° (±105°) |
- | - | 235 | 12 | - |
| 2. Articulação rotativa RL-50-TL1 |
2 | 8 | - | - | 340° (±170°) |
540° (±270°) |
245 | - | 5 |
3. Articulação |
4 | 4 | 180° (±90°) |
210° (±105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
4. Articulação |
4 | 4 | 180° (+130°/-50°) |
240° (+135°/-105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
| 5. Articulação de 2 eixos RL-50-003 |
4 | 4 | 180 ° (+180°/0°) |
235° (+180°/-55°) |
340° (±170°) |
540° (±270°) |
400 | 12 | 5 |
| 6. Articulação básica RL-90-BL1 |
4 | 8 | 180° (±90°) |
190° (±95°) |
180° (±90°) |
- | 1250 | 20 | 10 |
3) Como se pode combinar as articulações?
Cada articulação está equipada com cabos de tração. Em cada caso, estes devem ser posicionados para baixo da articulação. Isto significa que nem todas as combinações de articulações são possíveis. No entanto, é possível combinar articulações individuais com 1 a 6 graus de liberdade e implementar cinemáticas muito diferentes. Teremos todo o gosto em aconselhá-lo. A seguinte ilustração mostra algumas das possíveis combinações que permitem inúmeras possibilidades se forem considerados os tipos de articulações mais recentes, ou seja, a RL-50-003 e a RL-90-BL1.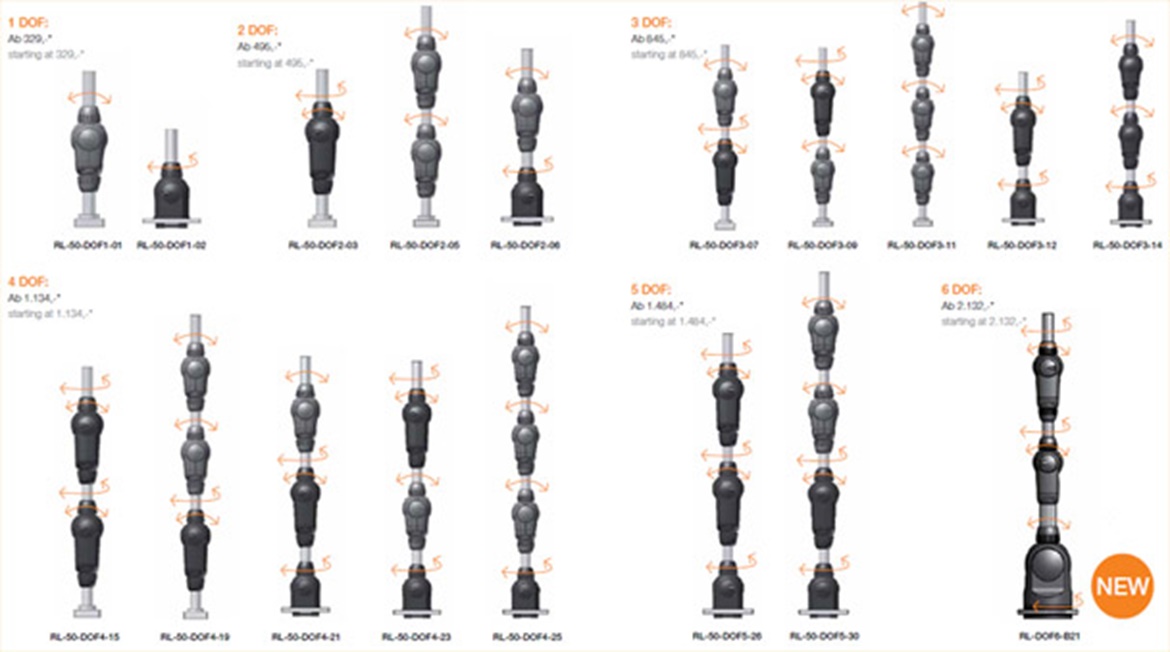
4) O que significa o termo "conjunto modular"?
O objetivo do conjunto modular robolink® é fornecer aos nossos clientes os componentes individuais (mecânicos) que possam ser usados para construir um sistema robótico. Dependendo da complexidade do que é exigido, podem ser configurados e encomendados braços articulados com vários graus de complexidade. A igus® fabrica os braços de acordo com o pedido dos clientes e envia as unidades já prontas para serem ligadas. No entanto, não basta unir as articulações (tal como se fossem peças LEGO®").5) Porque é que os braços articulados não podem ser simplesmente modificados?
Em todas as articulações são utilizados cabos de tração. São necessários 2 cabos para cada grau de liberdade (princípio antagónico). Se os cabos da articulação superior (2) tiverem de ser encaminhados pela articulação inferior (1) sem qualquer orientação, os movimentos das duas articulações deixam de ser independentes um do outro. Para conseguir que sejam independentes um do outro, é necessário que a tensão do cabo da articulação superior (2) seja desconetada dos movimentos da articulação inferior (1). Isto é feito utilizando um sistema especial de cabos Bowden na abertura da articulação inferior (ver figura). Os cabos movem-se livremente em conjunto no interior dos tubos de ligação entre as articulações.Se os braços articulados multiaxiais forem encomendados à igus, todos os elementos dos cabos Bowden são colocados antecipadamente e todo o conjunto é enviado pronto a ligar, ou seja, com todos os cabos e tubos na configuração pretendida.

Mangueira pneumática (gripper)
2Cabo Bowden quádruplo
3Cabo do sensor - articulação 2
44 cabos deslocam-se livremente dentro do tubo
5Cabo Bowden individual para rotação
68 cabos deslocam-se livremente dentro do tubo
6) Que comprimento/força nos cabos são necessários para movimentar as articulações?
O ponto de funciomento dos cabos no interior das articulações é definido consoante o tamanho:RL-50: Diâmetro efetivo de 50 mm (movimento rotativo e oscilante)
RL-90: Diâmetro efetivo de 90 mm (movimento oscilante), ou 120 mm (movimento rotativo)
A distância do cabo até à articulação RL-50 é então calculada da seguinte forma
π x d/4 ≈ 39 mm para um movimento angular de 90°
π x d/2 ≈ 79 mm para um movimento angular de 180°
As forças de tração dos cabos (dependendo dos binários que são aplicados) podem ir até 600 N.
7) O que está incluído no fornecimento de uma articulação?
Articulação de plástico (PA 2200) montada, incl. os rolamentos (alumínio anodizado duro = standard)
Cabos Dyneema
Hastes de alumínio (standard = 100 mm incluídos em cada caso, comprimentos diferentes sob consulta)
Sensores angulares opcionais (-WS), com 3 m de cabo, instalados e testados. Bocais para cabos gratuitos, tal como acordado com o cliente.
8) O que está incluído no fornecimento de um braço articulado?
Todas as articulações foram pré-montadas de acordo com o ponto 7)
Todos os cabos são orientados com segmentos especiais para cabos Bowden de acordo com o ponto 5)
Tubos de alumínio entre as articulações, personalizados de acordo a vontade do cliente
Placa de fixação na base do braço
Cabos do sensor orientados (opção -WS), com 3 m de cabo instalado e testado em cada caso. Bocais para cabos gratuitos, tal como acordado com o cliente.
9) O que está incluído no fornecimento de um "conjunto completo"?
Braço articulado conforme descrito no ponto 6), mas também com o drive de acionamento MIT constituído por:Motores de passo da igus®, correspondentes ao número de eixos do braço
Caixa de transmissão planetária para cada motor
"Roda de acionamento" para ligar os cabos ao acionamento
"Ferramenta de tensionamento" para facilitar o tensionamento das rodas de acionamento
Estão disponíveis diferentes versões do alojamento para instalação dos motores e no qual o braço é montado
Os seguintes itens NÃO estão incluídos:
Gripper (opcionalmente disponível na igus®, mas também pode ser adaptado)
Componentes de controlo
Cabos do motor (opcionalmente disponíveis na igus®)
10) Que sensores angulares são utilizados?
Nas articulações, existem sensores angulares incrementais (opcionais) da Austriamicrosystems (AS5304A). Tecnicamente, não são possíveis neste momento encoders absolutos. Para definir a posição zero, usamos um sensor de efeito Hall que se encontra situado a meio do ponto de oscilação/rotação de uma articulação. Isto significa que cada articulação deve ser "iniciada" quando a alimentação é ligada. Na nossa documentação técnica disponibilizamos mais informações sobre a cablagem dos sensores e pinout.A resolução dos encoders é (diferente consoante a articulação!):
4640 sinais/360° no caso de todos os movimentos rotativos do tamanho RL-50 da articulação
(29 pares do pólos x 160 sinais/par de pólos) ≈ 0,078°
4960 sinais/360° no caso de todos os movimentos de oscilação do tamanho RL-50 da articulação
(31 pares de polos x 160 sinais/par de polos) ≈ 0,073°
9920 sinais/360° no caso de todos os movimentos do tamanho RL-90 da articulação ("Base")
(62 pares de polos x 160 sinais/par de polos) ≈ 0,036

Sensor de efeito Hall para o movimento de rotação
2Encoder para o movimento de rotação
3Encoder para o movimento de oscilação
4Sensor de efeito Hall para o movimento de rotação
Sensores angulares incrementais magnéticos. Os sensores têm uma resolução de ~0,07° por eixo. Todas as unidades de sensores estão prontas para serem instaladas nas respetivas articulações Cada uma tem um cabo de 3 m (6 derivações para cada DOF)
11) Os braços articulados podem ser utilizados dentro de água?
Sim, os componentes são basicamente constituídos em plástico (PA2200), alumínio anodizado, aço inoxidável (parafusos), cabos Dyneema (PE) e bocais em latão. Os sensores moldados podem ser encomendados (-SE = encoder vedado).

12) Que tipos de acionamento são possíveis?
Podem ser usados acionamentos muito diferentes para os cabos. Por ex., acionamentos para operação manual ("alavancas"), componentes pneumáticos (por ex., "músculos" pneumáticos) ou motores elétricos (motores BLDC, motores DC, servomotores, motores lineares, motores de passo). A igus® pode disponibilizar motores de passo com caixas de transmissão planetárias como o possível conceito de acionamento. Estão disponíveis os seguintes elementos :- Motor de passo NEMA23 (versão com cabo entrançado ou conector) com caixa de transmissão planetária 1:16
- Motor de passo NEMA17 (versão com cabo entrançado ou conector) com caixa de transmissão 1:35
Motor de passo
2Caixa de transmissão planetária
3Roda de acionamento tensionável

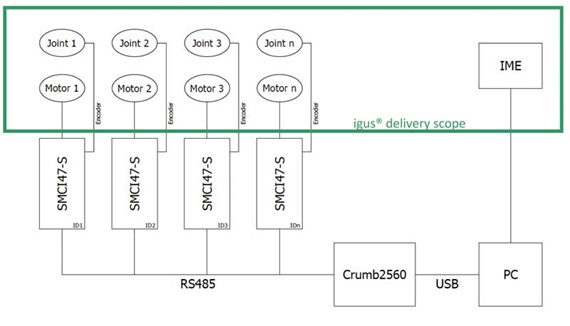
13) Como são controlados os braços articulados robolink®?
A igus® não desenvolve, componentes de controlo. A gama de fornecimento de um conjunto robolink® está limitada ao braço articulado ou ao braço articulado com a "unidade de acionamento".Os componentes de controlo podem de ser fornecidos ou adquiridos pelos próprios clientes.
14) O que devo fazer para poder usar o software "open-source" IME (editor de movimentos da igus)?
Pode fazer o download gratuito do software. O software encontra-se sob a forma de uma interface gráfica de utilizador que, com movimentos simples, pode ser programada e guardada. Não está incluído um sistema de controlo de contornos (ou cinemática inversa).15) Que materiais são utilizados?
Articulações: Componentes de poliamida PA 2200, parafusos em aço inoxidável, anéis dos rolamentos em alumínio anodizado duro, em alternativa ao iglidur® J ou ao aço inoxidável.Tubos de ligação: Alumínio anodizado, em alternativa ao GRP ou ao CRP
Cabos:Cabos Dyneema, bocais em latão para a extremidade dos cabos.
16) Que grippers podem ser utilizados?
"Todos" os grippers podem ser combinados com os nossos braços robóticos articulados. Devido à capacidade de carga relativamente reduzida do conjunto, os grippers devem ser o mais leves possível. Existem no mercado uma vasta gama de garras (grippers) pneumáticas leves, por ex., em empresas como a SCHUNK, a FESTO ou a FIPA. Se não forem utilizados componentes pneumáticos conforme é muitas vezes usual, é necessário utilizar as garras elétricas. Existem diversas garras elétricas muito leves no mercado, por ex., da GIMATIC, da SCHUNK ou da SOMMER (que, têm um custo superior ao das garras simples pneumáticas). Desde 2013, a igus® tem fornecido garras em plástico simples com o motor elétrico localizado no tubo robolink®. Opcionalmente, as pinças da garra também podem ser escolhidas aqui.17) Quanto custam as articulações ou "conjuntos"?
Todos os preços das articulações e conjuntos estão indicados no nosso catálogo. Em geral, um "conjunto completo" com motores, caixas de transmissão, alojamentos, articulações e sensores custa um pouco mais do que 1000 € por eixo. Por outras palavras, cerca de 6000 € por um conjunto com 6 graus de liberdade. Um braço articulado SEM motores (mas com sensores) custa cerca de metade (ou seja, cerca de 500 € por eixo). Por exemplo:6 DOF (graus de liberdade) ~ 3000 €

6 DOF (graus de liberdade) ~ 6000 €


