Mais sobre soluções de automação low-cost
A alta flexibilidade proporcionada pelo nosso conceito modular é o que torna a Automação de Low-Cost tão universalmente aplicável. Dependendo da aplicação, pode ser criada uma solução personalizada com o kit de construção e posteriormente complementada com outros produtos. Para além dos motores de passo da igus®, a articulação robótica também pode ser combinada com outros motores ou acionamentos pneumáticos. O sistema modular de articulação não está associado a nenhum sistema de comando especial, permitindo o mais elevado grau de liberdade possível no que respeita ao planeamento e à implementação de processos de automação.

Apoio no armazém com o robolink®
O robolink® coloca uma peça de cada vez nas respetivas prateleiras do armazémApoio no armazém com o robolink®
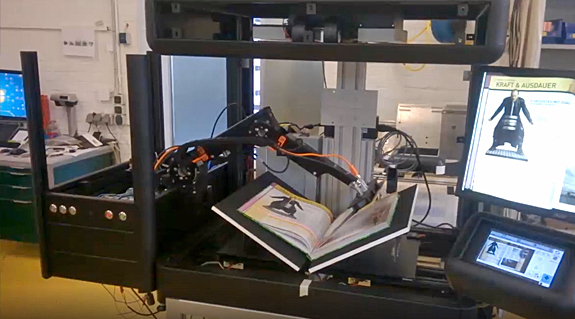
Scanner de livros automático
O robolink® vira as páginas no scanner para livrosScanner de livros automático
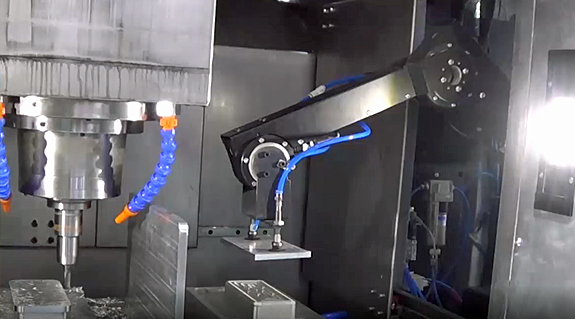
Máquina-ferramenta
O robolink® remove os componentes da máquina-ferramentaMáquina-ferramenta
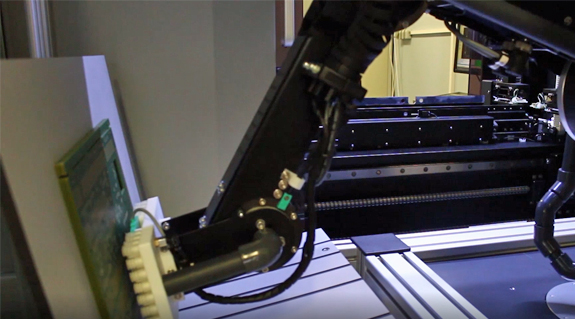
Controlo de qualidade para placas de circuito impresso
robolink coloca placas de circuito impresso numa unidade de testeControlo de qualidade para placas de circuito impresso

Embalagem automatizada de respiradores
Embalagem automatizada de respiradoresEmbalagem automatizada de respiradores

Expansão de máquinas parcialmente automatizadas
Expansão de máquinas parcialmente automatizadasExtensão de máquinas automatizadas

