Alterar idioma :
Porcas com folga reduzida
O que é que deve fazer caso ocorram folgas axiais não desejadas?




O que é a folga axial afinal?
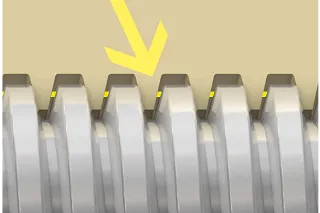
Amarelo = Folga axial
A folga axial pode ser usada para descrever o movimento perdido, o "curso morto" , no fuso de avanço como resultado da folga entre o fuso de avanço e a porca. O termo folga também é frequentemente associado a ele, mas o termo técnico correto é folga axial. Portanto, é o movimento da porca na direção axial sem o movimento do fuso de avanço. Os acionamentos de fuso de avanço exigem uma folga mínima para manter sua função. Se a folga axial for muito pequena, o torque necessário para mover a porca também aumentará.
Os parâmetros específicos da aplicação devem ser observados, além da folga do acionamento do fuso de avanço causada pelas tolerâncias de fabricação. Além das influências ambientais térmicas e higroscópicas, a folga mínima a ser considerada na aplicação também deve levar em conta o calor de atrito gerado pela aplicação. Isso desempenha um papel decisivo em relação ao comportamento de expansão do material de polímero usado. Como a folga axial no sistema pode mudar com as flutuações de temperatura.
Que opções oferece a gama de produtos da igus neste caso?
Para reduzir a folga axial indesejada, além da escolha correta do material, um mecanismo de pré-carga provou ser uma medida eficaz. Há quatro variantes com pré-tensão para nossas roscas de avanço rápido e roscas trapezoidais dryspin® : folga zero, folga baixa, pré-carga e porca AB. Aqui você encontrará todas as vantagens e instruções de montagem para nossas porcas de fuso de avanço com folga reduzida.
Para aplicações com cargas elevadas, altas temperaturas ou em ambientes altamente poluídos, sempre deve ser usada uma porca padrão. A razão para isso é que os três princípios são anulados por cargas elevadas. Por esse motivo, as cargas axiais estáticas máximas são especificadas separadamente para cada modelo de porca.
A porca com folga zero
Uma das soluções mais precisas é a porca ZB. Ela consiste em vários componentes e é autoajustável à vida útil. Ela é particularmente adequada para acionamentos de fusos de avanço com roscas de avanço rápido para ajuste rápido de pequenas cargas. O princípio livre de folga garante uma folga mínima durante toda a vida útil. Ideal para posicionamento preciso e movimentos de alimentação em tecnologia médica, laboratorial e de impressão, bem como na ampla gama de ciências da vida. A porca consiste em uma porca de suporte, um colar de fixação com mola de torção, um disco de atrito e o elemento axial. A mola de torção é usada para aplicar pré-tensão ao sistema de rosca.
- Folga axial mínima por toda a vida
- Posicionamento e movimentos de alimentação mais precisos
- Em roscas de avanço rápido dryspin
- porca de flange
- Direção da rosca: RH
- Material: iglidur J



Folga zero: Dados técnicos
170) O torque de marcha lenta da porca com folga zero aumenta com a vida útil. Para fins de cálculo e projeto, recomenda-se que o torque máximo de marcha lenta seja levado em consideração.
| Thread | F axial estático máximo [N] | Torque máximo de marcha lenta (com mola)170) de [Nm] | Número da peça |
|---|---|---|---|
| Ds5x5 | 75 | 0,02 | DST-JFRM-ZB-0001-DS5X5 |
| Ds6,35x2,54 | 75 | 0.005-0.02 | DST-JFRM-ZB-0001-DS6.35X2.54 |
| Ds6,35x5,08 | 75 | 0.005-0.02 | DST-JFRM-ZB-0001-DS6.35X5.08 |
| Ds6,35x12,7 | 75 | 0.005-0.02 | DST-JFRM-ZB-0001-DS6.35X12.7 |
| Ds6,35x25,4 | 75 | 0.005-0.02 | DST-JFRM-ZB-0001-DS6.35X25.4 |
| Ds8x10 | 150 | 0.01-0.03 | DST-JFRM-ZB-0001-DS8X10 |
| Ds8x15 | 150 | 0.01-0.03 | DST-JFRM-ZB-0001-DS8X15 |
| Ds8x24 | 150 | 0.01-0.03 | DST-JFRM-ZB-0001-DS8X24 |
| Ds10x12 | 150 | 0.01-0.04 | DST-JFRM-ZB-0001-DS10X12 |
| Ds10x25 | 150 | 0.01-0.04 | DST-JFRM-ZB-0001-DS10X25 |
| Ds10x50 | 150 | 0.01-0.04 | DST-JFRM-ZB-0001-DS10X50 |
| Ds12x3 | 500 | 0,08 | DST-JFRM-ZB-0001-DS12X3 |
| Ds12x5 | 500 | 0,08 | DST-JFRM-ZB-0001-DS12X5 |
| Ds12,7x12,7 | 500 | 0,08 | DST-JFRM-ZB-0001-DS12.7X12.7 |
| Ds12x15 | 500 | 0,08 | DST-JFRM-ZB-0001-DS12X15 |
| Ds12x25 | 500 | 0,08 | DST-JFRM-ZB-0001-DS12X25 |
| Ds14x4 | 500 | 0,08 | DST-JFRM-ZB-0001-DS14X4 |
| Ds14x25 | 500 | 0,08 | DST-JFRM-ZB-0001-DS14X25 |
| Ds14x30 | 500 | 0,08 | DST-JFRM-ZB-0001-DS14X30 |
A porca de pré-carga
A porca com pré-carga convence com uma folga axial mínima e a mais alta precisão de posicionamento. É a alternativa econômica para a folga zero e perfeitamente adequada para passos pequenos. Esse é o princípio comprovado de pré-carga da SHT-PL. As áreas de aplicação típicas incluem impressoras 3D.
- Para roscas de avanço rápido até um diâmetro de rosca de 6,35 mm
- Porca de fuso de avanço cilíndrico com flange
- Sentido da rosca: rosca direita
- Material: iglidur J



Porca de fuso de avanço de pré-carga: Dados técnicos
| Thread | F axial estático máximo [N] | torque máximo de marcha lenta (com mola) de [Nm] | Número da peça |
|---|---|---|---|
| Ds6,35x1 | 30 | 0,10 | DST-JFRM-PL-0001-DS6,35X1 |
| Ds6,35x2,54 | 30 | 0,10 | DST-JFRM-PL-0001-DS6.35X2.54 |
| Ds6,35x5,08 | 30 | 0,10 | DST-JFRM-PL-0001-DS6.35X5.08 |
| Ds6,35x6,35 | 30 | 0,10 | DST-JFRM-PL-0001-DS6.35X6.35 |
| Ds10x2 | 40 | 0,10 | DST-JFRM-PL-0001-DS10X2 |
| Ds10x3 | 40 | 0,10 | DST-JFRM-PL-0001-DS10X3 |
| Ds10x12 | 35 | 0,15 | DST-JFRM-PL-0001-DS10X12 |
A porca de baixa folga
Nossas porcas de fuso de avanço LC são todas equipadas com dois anéis O-ring de elastômero. O princípio funcional é semelhante ao da porca AB. No entanto, com a ajuda da porca LC, é possível obter uma redução na folga nesse caso. Os anéis O-ring aplicam uma pré-tensão radial circunferencial no sistema de rosca, pressionando os flancos da porca e as roscas do fuso de avanço. Isso garante uma pré-tensão axial e radial constante da porca. A alta suavidade operacional e a compra econômica são outras vantagens da porca LC.
- Folga axial reduzida devido à pré-tensão radial circunferencial
- Operação muito silenciosa devido à redução de possíveis vibrações
- Alternativa econômica para a porca de folga zero
- Em roscas de avanço rápido e trapezoidais dryspin até o diâmetro de rosca de 14 mm
- Porca de flange
- Direção da rosca: RH
- Material: iglidur J



Porca de fuso de avanço de baixa folga: Dados técnicos
Rosca de avanço rápido dryspin
| Thread | Estática máxima axial F [N] | torque máximo em marcha lenta (com O-ring) de [Nm] | Número da peça |
|---|---|---|---|
| Ds6,35x2,54 | 40 | 0,005 | DST-JFRM-LC-0001-DS6.35X2.54 |
| Ds6,35x5,08 | 40 | 0,005 | DST-JFRM-LC-0001-DS6.35X5.08 |
| Ds6,35x12,7 | 40 | 0,005 | DST-JFRM-LC-0001-DS6.35X12.7 |
| Ds6,35x25,4 | 40 | 0,005 | DST-JFRM-LC-0001-DS6.35X25.4 |
| Ds8x10 | 75 | 0,01 | DST-JFRM-LC-0001-DS8X10 |
| Ds8x15 | 75 | 0,01 | DST-JFRM-LC-0001-DS8X15 |
| Ds10x12 | 75 | 0,01 | DST-JFRM-LC-0001-DS10X12 |
| Ds10x25 | 75 | 0,01 | DST-JFRM-LC-0001-DS10X25 |
| Ds10x50 | 75 | 0,01 | DST-JFRM-LC-0001-DS10X50 |
| Ds12x5 | 125 | 0,03 | DST-JFRM-LC-0001-DS12X25 |
| Ds12x25 | 125 | 0,03 | DST-JFRM-LC-0001-DS12X5 |
| Ds14x25 | 125 | 0,03 | DST-JFRM-LC-0001-DS14X25 |
| Ds14x30 | 125 | 0,03 | DST-JFRM-LC-0001-DS14X30 |
| Ds14x40,6 | 125 | 0,03 | DST-JFRM-LC-0001-DS14X40.6 |
Porca de fuso de avanço trapezoidal dryspin
| <br />Rosca<br />inicio único | Estática máxima axial F [N] | torque máximo em marcha lenta (com O-ring) de [Nm] | Número da peça |
|---|---|---|---|
| Tr8x1,5 | 75 | 0.01-0.03 | JFRM-LC-0001-TR8X1.5 |
| Tr10x2 | 75 | 0.01-0.03 | JFRM-LC-0001-TR10X2 |
| Tr10x3 | 75 | 0.01-0.03 | JFRM-LC-0001-TR10X3 |
| Tr12x3 | 125 | 0,06 | JFRM-LC-0001-TR12X3 |
| Tr12x4 | 125 | 0,08 | JFRM-LC-0001-TR14X3 |
| Tr14x4 | 125 | 0,08 | JFRM-LC-0001-TR14X4 |
Porca de fuso de avanço trapezoidal dryspin de inicio múltiplo
| Rosca<br />inicio múltiplo | |||
|---|---|---|---|
| Tr06x2P1 | 40 | 0.01-0.03 | JFRM-LC-0001-TR06X2P1 |
| Tr12x6P3 | 125 | 0,06 | JFRM-LC-0001-TR12X6P3 |
Porca do fuso de avanço anti-folga
Em geral, os acionamentos por fuso de avanço podem produzir ruídos e vibrações. Em especial, fusos de avanço longos e grandes distâncias de deslocamento podem causar vibrações autoinduzidas no sistema de deslizamento. Devido às suas boas propriedades de deslizamento, as porcas de fuso de avanço fabricadas com os materiais tribologicamente otimizados da iglidur tendem a produzir muito menos ruído do que os plásticos ou metais convencionais, como bronze ou latão.
Para reduzir o ruído, um mecanismo de pré-carga também é uma medida eficaz, além da escolha correta do material. No caso da porca do fuso de avanço AB, um anel de elastômero aplica uma força em um inserto com uma rosca correspondente, que é pressionada nas roscas do fuso de avanço. É importante que essa pré-tensão não esteja presente em todo o comprimento e nem em toda a volta. Isso garante uma baixa folga axial apenas em uma pequena faixa. O princípio funcional dessa porca de fuso de avanço difere significativamente do da porca de fuso de avanço com folga zero.
- Redução de ruídos e vibrações
- Para roscas trapezoidais até um diâmetro de rosca de 24 mm
- Porcas de fuso de avanço cilíndricas e de flange
- Direção da rosca: RH e LH
- Material: iglidur J e iglidur R



Porca de fuso de avanço anti-folga: Dados técnicos
Porca cilíndrica trapezoidal do fuso de avanço
| Thread | Superfície de apoio eficaz [mm2] | Estática máxima axial F [N] | Número da peça |
|---|---|---|---|
| Tr8x1,5 | 228 | 683 | JSRM-AB-2220-TR8X1.5 |
| Tr10x2 | 283 | 848 | JSRM-AB-2220-TR10X2 |
| Tr12x3 | 396 | 1.188 | JSRM-AB-2220-TR12X3 |
| Tr16x4 | 704 | 2.111 | JSRM-AB-2220-TR16X4 |
| Tr18x4 | 905 | 2.714 | JSRM-AB-2220-TR18X4 |
| Tr20x4 | 1.131 | 3.393 | JSRM-AB-2220-TR20X4 |
| Tr24x5 | 1.621 | 4.863 | JSRM-AB-2220-TR24X5 |
Porca de fuso de avanço trapezoidal com flange
| Rosca<br />iglidur® J | Superfície de apoio eficaz [mm2] | Estática máxima axial F [N] | Número da peça |
|---|---|---|---|
| Tr10x2 | 353 | 1.060 | JFRM-AB-2220-TR10X2 |
| Tr10x3 | 334 | 1.001 | JFRM-AB-2220-TR10X3 |
| Tr12x3 | 396 | 1.188 | JFRM-AB-2220-TR12X3 |
| Tr14x4 | 471 | 1.414 | JFRM-AB-2220-TR14X4 |
| Tr16x2 | 613 | 1.838 | JFRM-AB-2220-TR16X2 |
| Tr16x4 | 704 | 2.111 | JFRM-AB-2220-TR16X4 |
| Tr18x4 | 905 | 2.714 | JFRM-AB-2220-TR18X4 |
| Tr20x4 | 1.131 | 3.393 | JFRM-AB-2220-TR20X4 |
| Tr24x5 | 1.621 | 4.863 | JFRM-AB-2220-TR24X5 |
Porca do fuso de avanço cilíndrico trapezoidal iglidur R
| Rosca<br />iglidur® R | Superfície de apoio eficaz [mm2] | F axial estático máximo [N] | Número da peça |
|---|---|---|---|
| Tr10x2 | 283 | 424 | RSRM-AB-2220-TR10X2 |
| Tr12x3 | 396 | 594 | RSRM-AB-2220-TR12X3 |
| Tr16x4 | 704 | 1.056 | RSRM-AB-2220-TR16X4 |
| Tr18x4 | 905 | 1.357 | RSRM-AB-2220-TR18X4 |
| Tr20x4 | 1.131 | 1.696 | RSRM-AB-2220-TR20X4 |
| Tr24x5 | 1.621 | 2.432 | RSRM-AB-2220-TR24X5 |
Porca do fuso de avanço trapezoidal iglidur R
| Rosca<br />iglidur® R | Superfície de apoio eficaz [mm2] | Estática máxima axial F [N] | Número da peça |
|---|---|---|---|
| Tr10x2 | 353 | 530 | RFRM-AB-2220-TR10X2 |
| Tr10x3 | 334 | 501 | RFRM-AB-2220-TR10X3 |
| Tr12x3 | 396 | 594 | RFRM-AB-2220-TR12X3 |
| Tr14x4 | 471 | 707 | RFRM-AB-2220-TR14X4 |
| Tr16x2 | 613 | 919 | RFRM-AB-2220-TR16X2 |
| Tr16x4 | 704 | 1.056 | RFRM-AB-2220-TR16X4 |
| Tr18x4 | 905 | 1.357 | RFRM-AB-2220-TR18X4 |
| Tr20x4 | 1.131 | 1.696 | RFRM-AB-2220-TR20X4 |
| Tr24x5 | 1.621 | 2.432 | RFRM-AB-2220-TR24X5 |
Seu contato técnico
Será um prazer responder suas perguntas pessoalmente!
igus® do Brasil+55 (11) 3531-4487Enviar e-mail
Horário de funcionamento:
De segunda a sexta-feira, das 8:00 às 17:00 horas.
Online:
24h